Samarbejdende undervandsrobotter på vej
 Af Lars Dalsgaard Adolfsen
Af Lars Dalsgaard Adolfsen
Der er et stort behov for en lille fleksibel og meget robust robot, der kan operere under vand, når fundamenter til havvindmøller eller olieboreplatforme skal tilses. I dag er det nødvendigt at leje en maskine, en ROV (Remotely Operated Vehicle), med tilhørende mandskab for at få inspiceret og udbedret skader på fundamenterne. Det er både omkostningstungt og operationen afhængig af godt vejr. Det skriver DTU i en pressemeddelelse.
- Vi har en vision om at skabe en modulær robot, der er simpel at operere – og derfor ikke kræver indsats fra et særligt teknisk mandskab. Den skal i første omgang kunne inspicere og løbende overvåge tilstanden af fundamentet på eksempelvis en vindmølle under vand eller anlægget i et havfiskeopdræt. På sigt er det tanken, at den modulære robot, der består af flere selvstændige robotter (moduler), som både kan arbejde sammenkoblet og hver for sig, også skal være i stand til at udføre reparationer på fundamentet, fortæller lektor Roberto Galeazzi, DTU Elektro.
Behovet for overvågning under vand er stigende
En markant stigning i antallet af havvindmøller i Europa de sidste 10 år har øget behovet for at kunne overvåge, inspicere og reparere fundamenter til vindmøller og olieboreplatforme.
Ifølge Ole Nørrekær Mortensen, Business Area Manager ved Force Technology, går tendensen mod udvikling af små autonome AUV’ere (Autonomous Underwater Vehicles) til erstatning for de nuværende større ROVer. Så perspektiverne i en autonom undervandsrobot er store i olie-gas branchen samt offshore vindmølleparker.
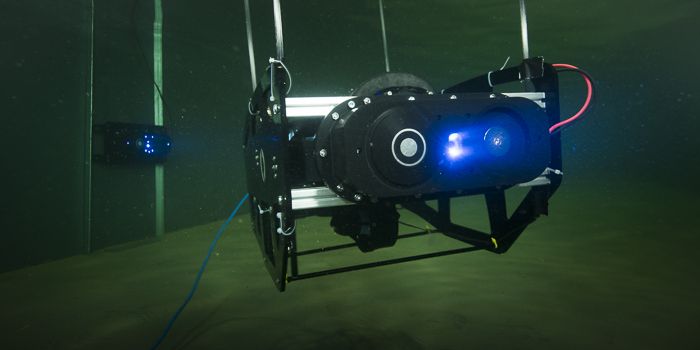
Nogle af Danmarks dygtigste robotforskere har på DTU’s laboratorium REMORA udviklet de første prototyper på en sådan undervandsrobot.
- Andre arbejder på tilsvarende projekter, men vores robot adskiller sig på et afgørende område. Den er nemlig modulær – hvilket betyder, at hver enkelt del af robotten både kan arbejde alene eller sammen med andre moduler. Ved at samarbejde kan robotterne anvende hinandens funktioner og bliver dermed helt autonome. Hvis en robot eksempelvis har problemer med sin propel, kan den koble sig sammen med et andet modul og bevæge sig ved hjælp af dennes propel. Det samme gælder på mange andre områder, fx i forhold til at have tilstrækkelig batterikapacitet, fortæller Roberto Galeazzi.
Tværfaglig indsats bag den samarbejdende robot
Den modulære robot kan bl.a. anvendes til at opsætte og udskifte sensorer på en undersøisk docking-station, der bliver placeret på fundamentet af en vindmølle for løbende at overvåge dets tilstand. Det kan ske ved brug af bare et enkelt modul.
Inden længe vil de danske forskere præsentere den første prototype på denne undervandsrobot.
Robotten er udviklet som en del af DTU’s satsning inden for autonome systemer i regi af DTU’s Maritime Center. Det er sket i et tværfagligt samarbejde på tværs af universitetet, hvor der bl.a. er indgået viden om mekanik, robotter, elektronik, miljø og havforskning. Laboratoriets arbejde omfatter både udvikling af hardware og software til at sikre den rette opbygning af den nye modulære robot.









{kind=link}